‘Mostly Harmless’ - The Build.
How much of a punch can a 2kg robot throw ? And how much sustained beating can a 2kg robot tolerate and still remain operational ?
The answers to these questions will become clear on Nov 9th at the next local robot wars competition, hosted by Omega Workshop in Trondheim.
The Inspiration⌗
For some reason, I have managed to miss out on all previous tournaments, but this spring I was persuaded to join as a referee (I later discovered that the tournament date conflicted with the date for a local whiskey festival - hence an acute shortage of available referees).
I showed up, not quite knowing what to expect, except fighting robots and a crowd of people. Since I arrived early, I had a chance to inspect the arena and the surroundings before too many spectators showed up.
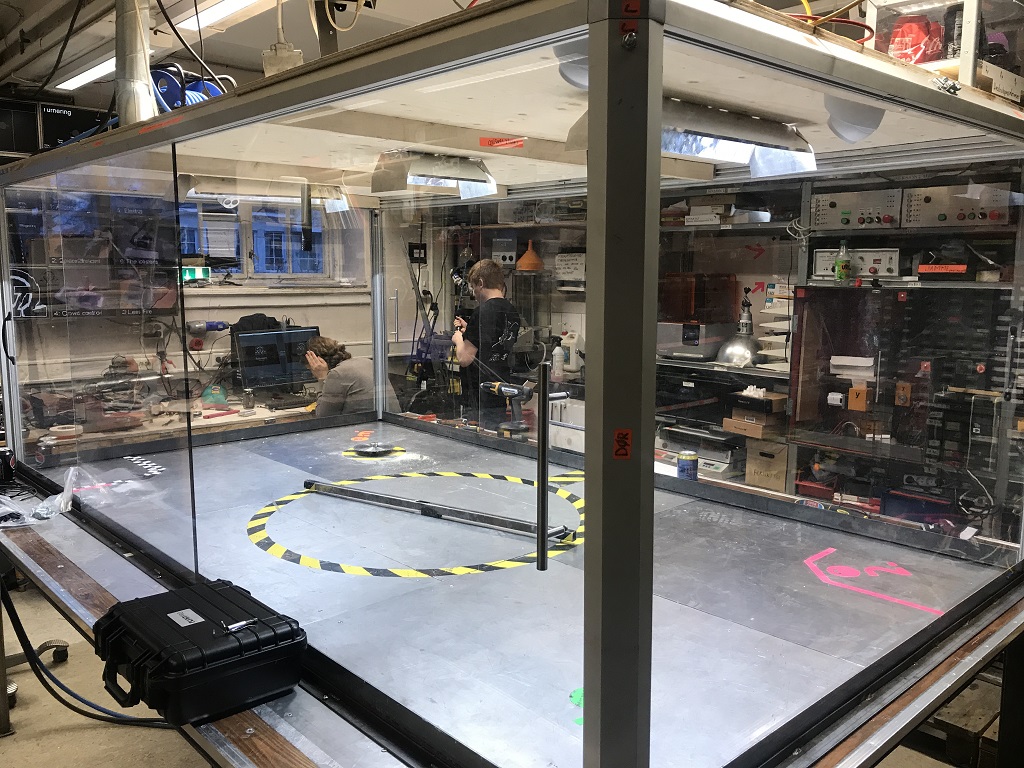
The walls were covered in monitors, shelves with electronic parts, CNC equipment, Tesla coil parts, modular synths and retro tech - from floor to ceiling. As the spectators and teams started to arrive, the room quickly filled up. The venue was already perfect. I then discovered that Japanese beer and cocktails were available in the next room. Things couldn’t really get much better - geekwise. I am now a card carrying life time member of Omega Workshop.


The competition started - and I was hooked. Instantly.
Design Choices and Constraints⌗
The competition rules are quite simple. Your robot can’t weigh in at more than 2kg. In addition to this you are allowed 2kg of battery weight. All use of lithium based batteries, lasers, chemical projectiles, pressurized tanks and dangerous chemicals is banned.
Since this was my first attempt at designing and building a battlebot, I decided to keep things as simple as possible. This translated to sourcing cheap “chinesium” hardware and using as many 3D printed or lasercut structural parts as possible. I sourced DC gear motors and also two halfway decent ESCs for controlling them. In addition to this, I also got hold of a really high RPM DC motor, some ball bearings, pulleys, belts, together with a RC controlled relay.
Given the competition, I don’t have any real hopes of winning the next tournament, but am totally capable of designing something that can inflict serious damage on soft targets and that also will fail spectacularly in case it encounters a hard target. Enter the…
Glass Cannon Design⌗
2 kilos isn’t a weight budget that allows for especially robust designs of all the necessary sub assemblies in such a robot. You will have to prioritize.
Given the competition, my initial instinct was to design a symmetrical robot, that would still operate after having been flipped.

Back to the drawing board.⌗
After having tested a prototype of the rotor, I was getting concerned about a few things.
- Damaging the acrylic arena walls would get me disqualified. I discarded the vertically oriented rotor design and started thinking avout a horizontal design instead.
- Given the momentum of the rotor. It would quite possibly decimate a counter rotating rotor. The only downside being that the robot most likely would flip itself (quite violently) if the rotor touched anything in its flipped position.
- Weight. It was obvious that the design would be too heavy.
Downforce⌗
Given the weight limitations, a self righting mechanism was out of the question. I was still worried about getting flipped over in the arena, but it struck me that I might be able to counter this by using really strong magnets.


A New Design⌗
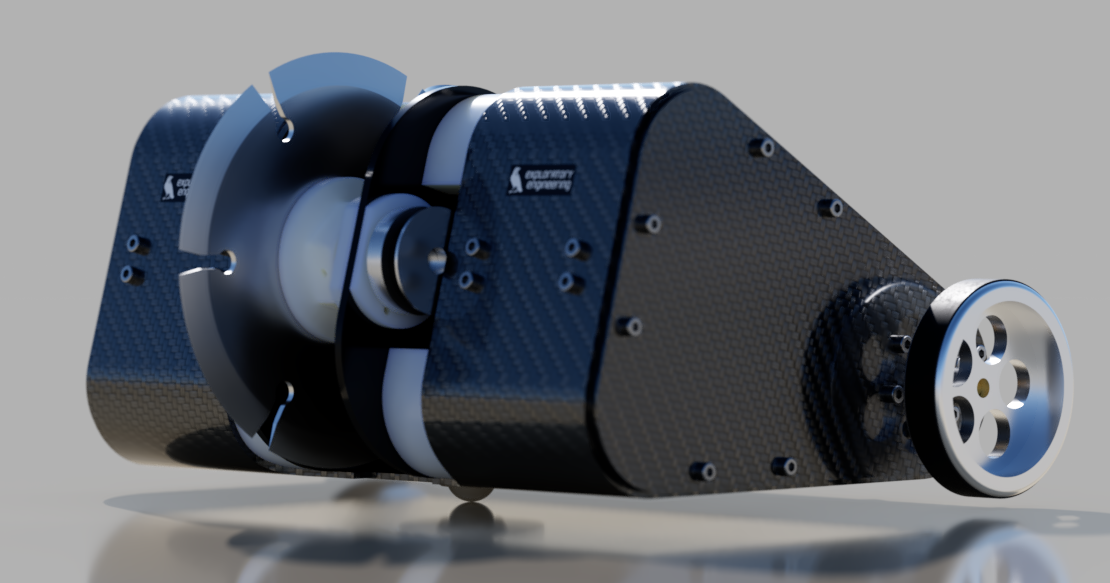
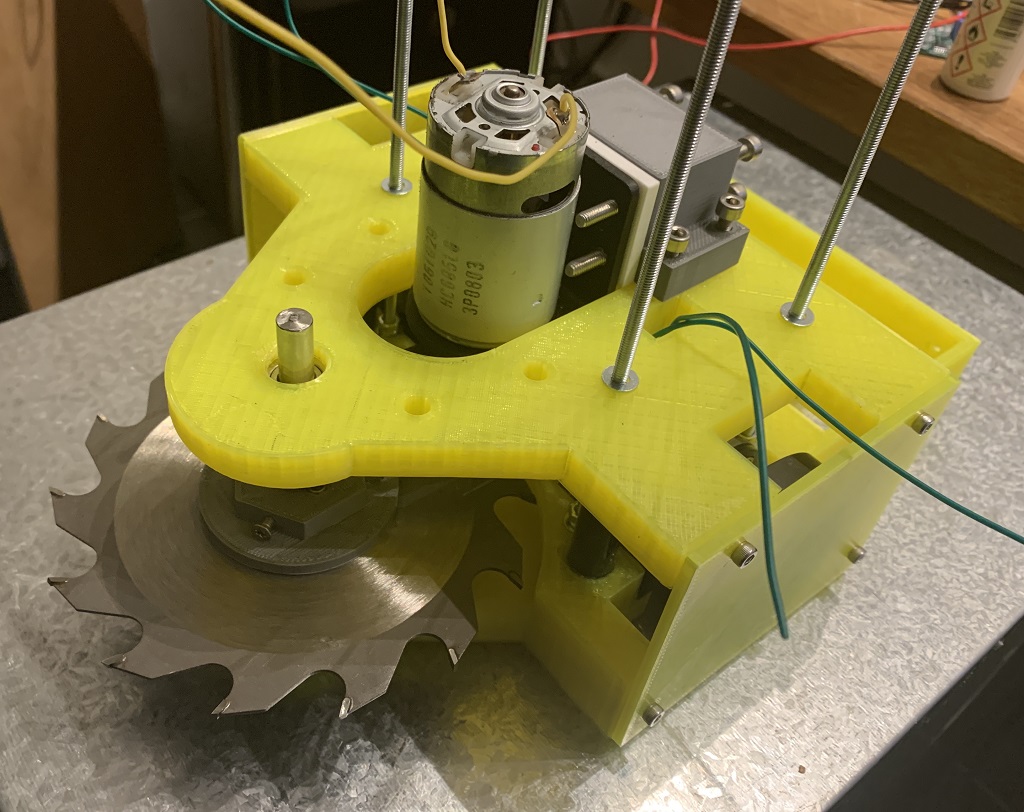
The magnets seemed promising, so I was comfortable going for a more traditional design, that also lent itself to a horizontally mounted rotor, where the rotor also could be mounted really close to the floor. If this robot were to hit the arena walls, the rotor would only touch the metal rails (which I hoped wouldn’t get me disqualified)
I also changed out the diamond coated rotor with a wood cutting blade. People have asked me why I didn’t go for a metal cutting blade instead. The answer is momentum. This blade is almost guarateed to dig into and hook the opponent, because of the spacing of the carbide coated teeth. A 250g rotor spinning at 10000 RPM should have sufficient rotational energy to provide an interesting effect on any opponent.
Unfortunately, given Newton’s third law, it may also have sufficient rotational energy to cause an interesting effect on the weapon platformitself. The rotating axis is held in place by ball bearings, which in turn are held in place by PLA - with 30% infill. The robot may end up eating itself alive.
Win or lose, the spectacle should be interesting to watch.
Initial testing⌗
The first challenge in the tournament is navigation through obstacles in the arena while attempting to destroy a selection of beer cans. Of course, the robot’s can killing abilities had to be put to the test. Pushing the can into the rotor required no more force than would be expected when - pushing a can. The rotor is actually a bit scary.
Altered Carbon⌗
Letting this little plastic robot try to fight it out in the arena without any form of armor, would be almost cruel. It needed a shell. A resillient one, that hopefully would be almost impossible to penetrate, given the energy levels one could expect to be faced with in the arena.

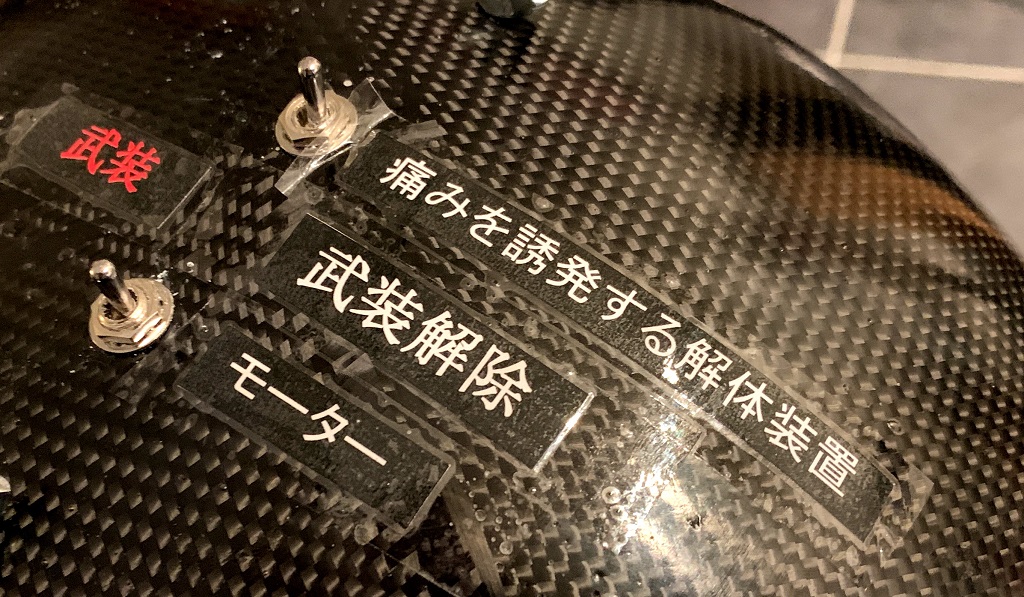
I decided to try making a carbon fiber shell, which turned out to be a quite involved and also a rather messy process.
First, I made silicone mold, using an IKEA steel sald bowl as a positive. I then created a support shell for the silicone, using plaster of paris. Carbon fiber weave could then be placed inside the silicone mold and then coated with epoxy. De-molding turned out to be easeier than expected.



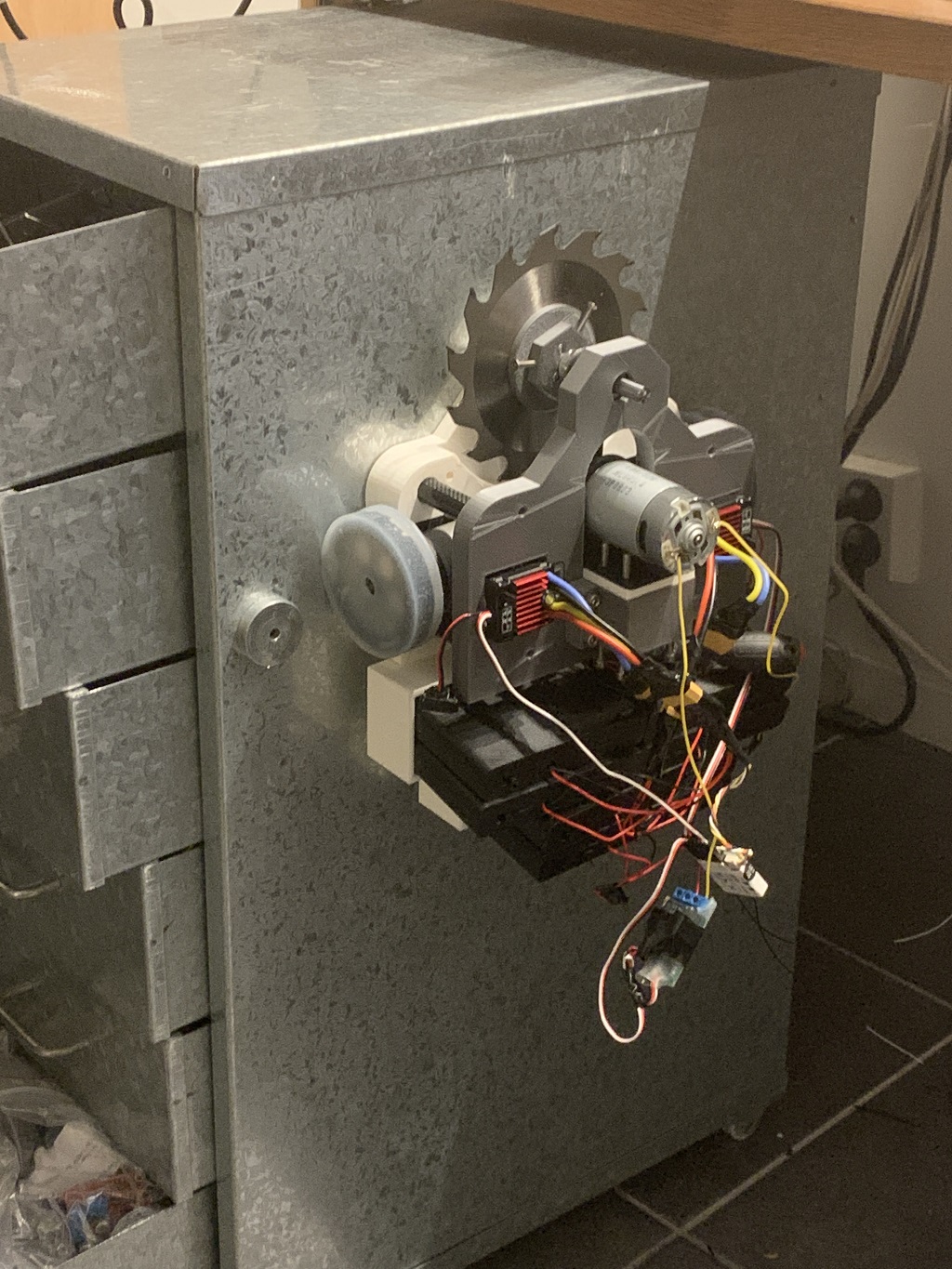
Final assembly⌗
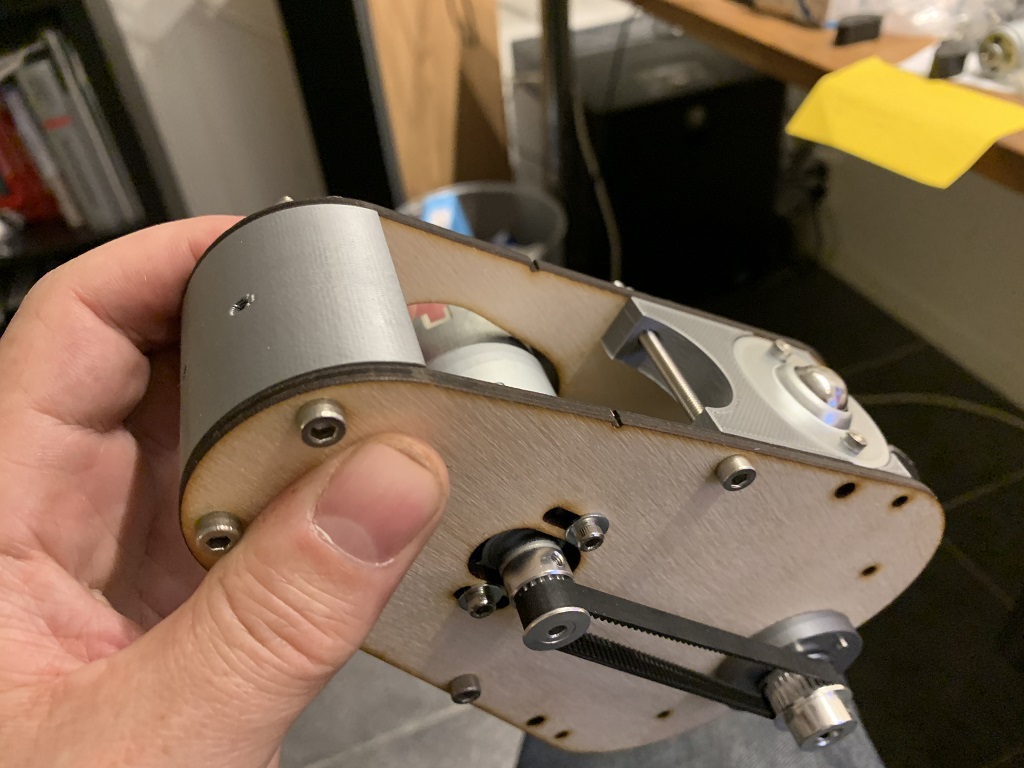
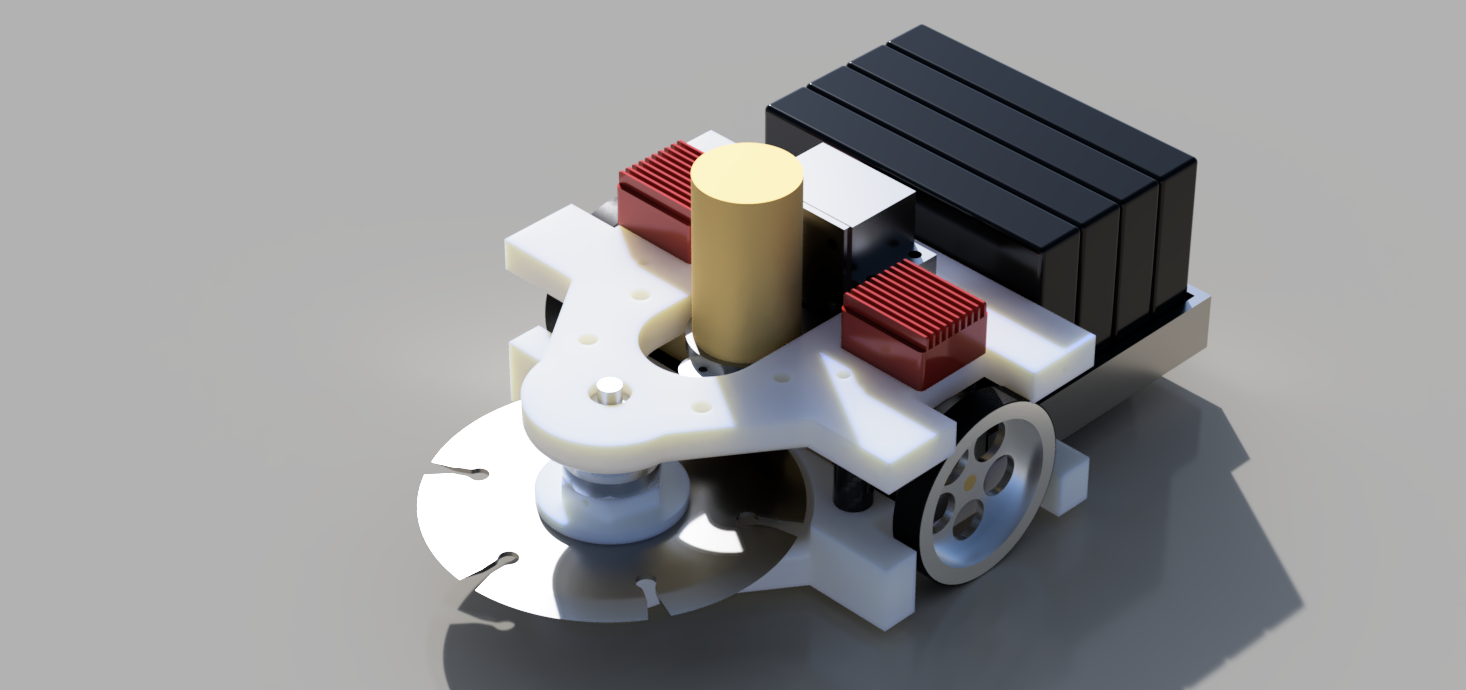
The final version has several minor tweaks in order to increase the stiffness of the frame. Four 12mm Carbon fibre tubes prevent any lateral movement between the bottom and top plastic frames. Four 4mm threaded steel rods go through both plates and prevents any vertical separation of the plates. This is necessary to prevent any shifts occuring in the rotor axis (which would lead to catastrophic failure).
The wiring is relatively straight forward, but also nerve wracking at the same time. Reversing the battery polarity would most likely damage the receiver or the ESCs. I fried one of the weapon relays early on - discovering that the RC receiver happily bled the source voltage from its dedicated power port right on through to the servo ports - making the weapon relay emit a puff of smoke. I now run the recevier directly on 6V from the ESCs.
The drive motors run on 9V 5000mAh alkaline battery pack. The weapon motor runs on a 25V 2500mAh alkaline pack and spins at 15000 rpm. The weapon motor draws a significant number of amps while spinning up the blade, but stabilizes at around 3A in steady state.
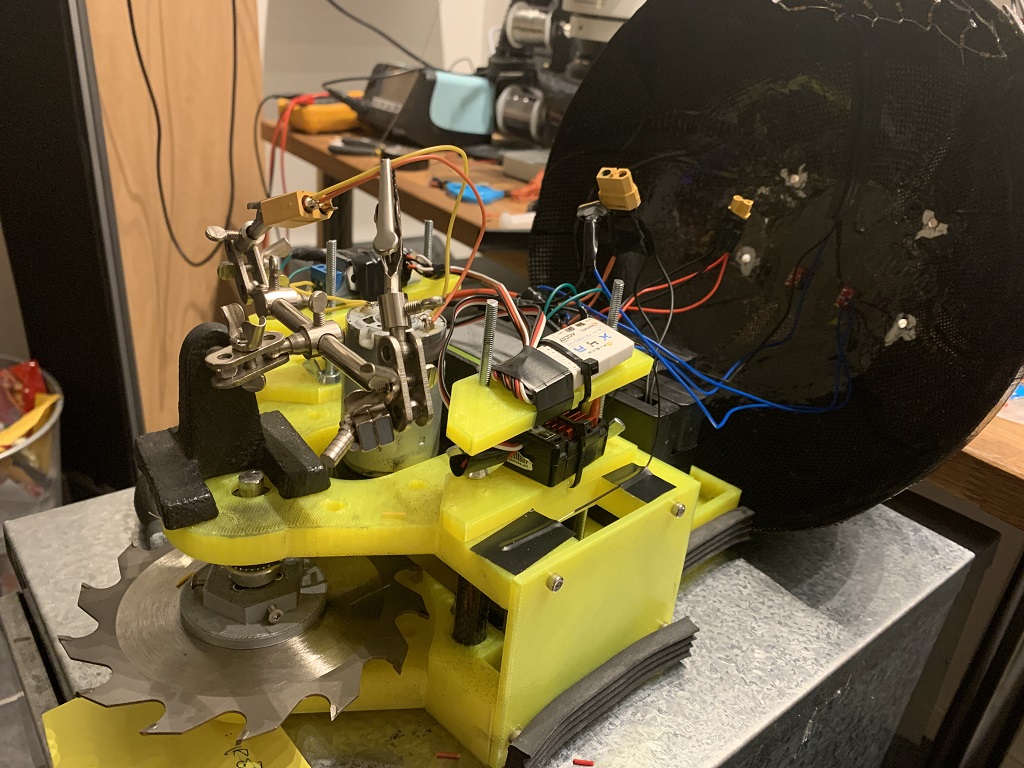
The FrSky X7 OpenTX radio seems like an ok choice for tank track type controls. It’s really easy to modify the throttle stick so that it becomes self centering. You also have a ton of parameters to play with.

The End Result⌗
…is my first ever mini battlebot - “Mostly Harmless”
See you in the arena!